SB-16B工业机器人循环生产线实训设备
工业机器人循环生产线实训装备,工业机器人智能生产线实训系统以工业化现场真应用作为教学蓝本,采用多种型式、多种规格、多种应用组合成型的工业应用生产线。主要以体现工业机器人典型应用,让学生撑握真实工业机器人现场应用方法。通过以工业现场真实应用案例实训,缩短教学实训与工厂岗位应用的差距。
工业机器人循环生产线实训装置,工业机器人智能生产线实训系统将整体涵盖高端装备制造业自动化领域中的核心技术,将机器人与现代化工业生产进行整体融合,为高技能综合型人才培养提供一个新的载体,为现代机器人技术及工业自动化生产的综合应用提供一个新的人才培养和创新平台,体现现代机器人产业中操作、安装、调试、维护、维修、升级改造、二次开发等职业能力要素,培养机器人技术应用领域高素质技术技能型人才。
一、工业机器人循环生产线实训设备概述
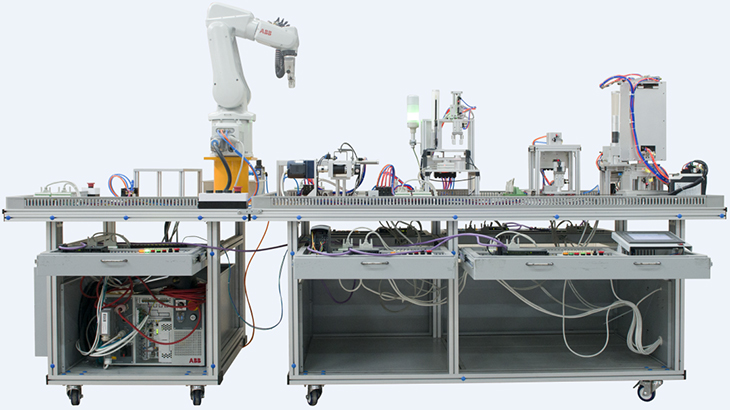
工业机器人循环生产线实训装备采用1+1组合式结构分别由安装在铝合金导轨式的实训台上的送料单元、加工单元、装配单元、双层输送单元、分拣单元5个单元,加上由铝合金导轨式的实训台上工业机器人码垛单元两大部分组合成多种组合方式的实训装备。电气布局采用抽屉式,所有其电气控制器都安装在网孔板式的抽屉上,这种机电分离的格式更加符合了工业实际情况。外观如上图所示。

工业机器人循环生产线实训设备外观图
图(图片仅供参考、以实物为主)
其中,每一工作单元都可自成一个独立的系统,同时也都是一个机电一体化的系统。各个单元的执行机构基本上以气动执行机构为主,但输送单元的机械手装置整体运动则采取伺服电机驱动、精密定位的位置控制,该驱动系统具有长行程、多定位点的特点,是一个典型的一维位置控制系统。分拣单元的传送带驱动则采用了通用变频器驱动三相异步电动机的交流传动装置,对物料进行分拣。码垛单元使用的是工业机器人,对物料进行入库和拆分出库。机器人控制技术、伺服位置定位控制和变频器技术是现代工业企业应用最为广泛的自动化控制技术。
在设备上应用了多种类型的传感器,分别用于判断物体的运动位置、物体通过的状态、物体的颜色及材质等。传感器技术是机电一体化技术中的关键技术之一,是现代工业实现高度自动化的前提之一。
在控制方面,的标准配置采用了基于RS485串行通信的PLC网络控制方案,即每一工作单元由一台PLC承担其控制任务,各PLC之间通过RS485串行通讯实现互连的分布式控制方式。用户可根据需要选择不同厂家的PLC及其所支持的通信模式,组建成一个小型的PLC网络。小型PLC网络以其结构简单,价格低廉的特点在小型自动生产线仍然有着广泛的应用,在现代工业网络通信中仍占据相当的份额。另一方面,掌握基于RS485串行通信的PLC网络技术,将为进一步学习现场总线技术、工业以太网技术等打下了良好的基础。
二、技术参数
1、交流电源:三相五线 AC 380 V±10% 50Hz;单相三线 AC 220 V±10% 50Hz;
2、温度:-10~50℃;环境湿度:≤90%无水珠凝结;
3、外形尺寸:长×宽×高=2100mm×1000mm×1600mm+1000mm×1000mm×1900mm;
4、整机功耗:≤1.5 kVA;
5、安全保护措施:采用独立式配电系统具有接地保护、漏电保护功能,安全性符合相关的国标标准。
三、功能特点
各个单元的基本功能如下:
1、供料单元
供料单元的基本功能:
供料单元是中的起始单元,在整个系统中,起着向系统中的其他单元提供原料的作用。
供料单元的具体功能:
按照需要将放置在料仓中待加工工件(原料)自动地推出到物料台上,以便输送单元的机械手将其抓取,输送到其他单元上。
供料单元的主要组成:
主要包括竖式料筒,顶料气缸,推料气缸,物料检测传感器部件,安装支架平台,材料检测装置部件,带保护接线端子单元等组成。
供料单元工作过程如下:
系统启动后,顶料气缸伸出顶住倒数第二个工件;推料气缸推出,把料槽中最底层的工件推到物料台上工件抓取位。工件到位传感器检测到工件到位后,推出气缸和顶料气缸逐个缩回,倒数第二层工件落到最底层,等待推出。搬运站机械手伸出并抓取该工件,并将其运送往加工站。
2、加工单元
加工单元的基本功能:
加工单元是中对工件处理单元之一,在整个系统中,起着对输送站送来工件进行模拟冲孔处理或工件冲压等作用。
加工单元的具体功能:
(1)、把该单元物料台上的工件(工件由输送单元的抓取机械手装置供料送来)送到冲压机构下面,完成一次冲压加工动作,然后再送回到物料台上,待输送单元的抓取机械手装置取出。
(2)、该单元物料台上的工件(工件由输送单元的抓取机械手装置从装配站送来)送到冲压机构下面,完成把小工件压入到大工件的工作过程,然后再送回到物料台上,待输送单元的抓取机械手装置取出。
加工单元的主要组成:
主要包括滑动料台,模拟冲头和冲床, 紧机械手,物料台伸出/缩回气缸,带保护接线端子单元及相应的传感器,电磁阀构等组成。
本站的功能是完成一个对工件的冲压加工过程,流程如下:
搬运站机械手把工件运送到物料台上→物料检测传感器检测到工件→机械手指夹紧工件→物料台回到加工区域冲压气缸的下方→冲压气缸向下伸出冲压工件→完成冲压动作后向上缩回→冲压气缸缩回到位→物料台重新伸出→到位后机械手指松开→搬运站机械手伸出并夹紧工件,将其运送往装配站。
3、装配单元
装配单元的基本功能:
装配单元是中对工件处理的力一单元,在整个系统中,起着对输送站送来工件进行装配及小工件供料的作用。
装配单元的具体功能:
将该单元将料仓内的黑色或白色小圆柱工件进行送料抬上。
(1)、把从加工单元已加工好的大工件进行装配(通过机械手把小工件装配到大工件内),然由输送单元的搬运机械手搬向分解单元。
(2)、把从供料单元的大工件进行装配(通过机械手把小工件装配到大工件内),然由输送单元的搬运机械手搬加工单元进行冲压的加工。
装配单元的主要组成:
主要包括供料机构,旋转送料单元,机械手装配单元,放料台,带保护接线端子单元等组成。
装配单元工作过程如下:
当搬运站的机械手把工件运送到装配站物料台上时,顶料气缸伸出顶住供料单元倒数第二个工件;挡料气缸缩回,使料槽中最底层的小圆柱工件落到旋转供料台上,然后旋转供料单元顺时针旋转180度(右旋),到位后装配机械手按下降气动手爪→抓取小圆柱→手爪提升→手臂伸出→手爪下降→手爪松开的动作顺序,把小园柱工件顺利装入大工件中,机械手装配单元复位的同时,旋转送料单元逆时针旋转180度(左旋)回到原位,搬运站机械手伸出并抓取该工件,并将其运送往物料分解站。
4、分拣单元
分拣单元的基本功能:
完成将上一单元送来的已加工、装配的工件进行分拣,使不同颜色的工件从不同的料槽进行分拣。
分拣单元的主要组成:
主要包括传送带机构,三相电机动力单元,分拣气动组件,传感器检测单元,高进度反馈和定位机构,带保护接线端子单元等组成。
分拣单元工作过程如下:
本站的功能是完成从装配站送来的装配好的工件进行分拣。当搬运站送来工件放到传送带上并为入料口光电传感器检测到时,即启动变频器,工件开始送入分拣区,金属工件进入第一个料槽,黑料进入第三个料槽,白料进入第二个料槽。
5、输送单元
输送单元的基本功能:
该单元通过到指定单元的物料台精确定位,并在该物料台上抓取工件,把抓取到的工件输送到指定地点然后放下的功能。
输送单元的主要组成:
主要包括双机械手,直线输单元,比例传送机构,多功能安装支架,同步轮,同步带, 带保护接线端子单元等组成。
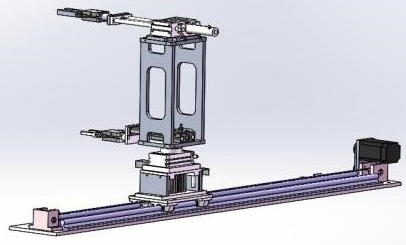
输送单元工作过程如下
本站的功能是完成向各个工作单元输送工件,系统分为双机械手单元和直线位移位置精确控制单元两部分,系统上电后,先执行回原点操作,当到达原点位置后,若系统启动,供料站物料台检测传感器检测到有工件时,机械手整体先提升到位后手爪伸出到位后手爪夹紧,手爪夹紧到位手爪开始缩会机械手整体下将到位后,伺服电机开始工作按设定好的脉冲量到加工站。加工站到位后机械手整体提升,提升到位后手爪伸出伸出到位后机械手整体下降,下降到位后工件已放入加工站物料台上,然后手爪松开,松开到位后机械手回缩,等加工站加工完成后再将工件送到装配站进行大小料装配,装配完成后机械手抓取物料送到分拣站进行分拣,这样双机械手的一个加工运动过程就完成了。只要料筒不缺料会持续以上过程。当料筒出现缺料后,机器人会搬运过来物料,机械手会运行到取料位置抓取机器人上的小料,然后放入小料筒中,然后返回原点,当机器人再次搬运过来物料,机械手会运行到取料位置抓取机器人上的大料,然后放入大料筒中,这样一个物料的拆分过程就完成了,直到把码垛料台上的物料全部拆分完成后为止。
6、机器人码垛单元
机器人码垛单元的基本功能:
该单元的主要功能是对分拣后的物料进行入库处理,对库里的物料进行拆分出库处理。
机器人码垛单元的主要组成:
主要包括码垛机构,机器人单元,手爪夹具、气动组件等

机器人码垛单元工作过程如下
本站的主要功能是对物料进行出入库处理。系统上电后,先执行复位然后按下启动按钮,系统进行复位,复位完成后系统直接启动。当分拣站分拣完成后,机器人会到对应的料槽抓取物料进行入库放到对应的料台上,料台上第一行是金属工件第二行是白料第三行是黑料。当料台放满后机器人会自动把物料放到废料盒中,当废料处理。只要料筒出现缺料,机器人就会把料台上的物料进行拆分出库处理。
四、实训项目
1、有机融合了机械技术(包括气动技术)、传感器技术、工业机器人、交流电动机变频调速和步进电机驱动控制、触摸屏技术、PLC控制及通信网络等技术,体现了现代制造业生产过程的特征。
★供料单元的安装与调试的实训;
★加工单元的安装与调试的实训;
★装配单元的安装与调试的实训;
★分拣单元的安装与调试的实训;
★输送单元的安装与调试的实训;
★码垛单元的安装与调试的实训;
★自动生产线控制的安装与调试的实训;
2、用于教学,可按工作过程导向,工学结合的模式规划教学活动,完成以下工作任务:
1)气动系统的安装与调试项目:
选用该装备配置的单出杆气缸、单出双杆气缸、旋转气缸等气动执行元件和单控电磁换向阀、双控电磁换向阀和磁性开关、吸盘真空发生器等气动控制元件,可完成下列气动技术的工作任务:
★气动方向控制回路的安装;
★气动速度控制回路的安装;
★摆动控制回路的安装;
★气动顺序控制回路的安装;
★气动机械手装置的安装;
★气动系统安装与调试;
★气动综合系统的设计与安装;
2)电气控制电路的安装和机器人以及PLC程序编写项目:
选用该装置配置的PLC模块、机器人、变频器模块和伺服驱动模块、传感器等,可完成下列PLC应用技术工作任务:
★三相电动机正反转控制电路的连接与控制程序编写;
★三相电动机控制电路的连接与控制程序编写;
★电动机调速控制电路的连接与控制程序编写;
★变频器模拟量控制的连接与控制程序编写;
★伺服电机控制电路的连接与参数设置;
★PLC控制网络控制技术;
★气动方向控制程序编写;
★气动顺序动作控制程序编写;
★气动机械手控制程序编写;
★皮带输送机控制程序编写;
★机器人硬件接线实训;
★机器人示教操作实训;
★机器人编程实训;
★机器人码垛搬运实训;
★机器人与PLC通讯实训;
★机器人仿真教学实训;
★机电一体化设备控制程序编写;
★自动生产线控制程序编写。
3)PLC通讯网络的安装、程序编制及调试:
★PLC控制技术---485通信技术的编程和调试
4)机电设备安装与调试项目
选用该装置配置的机电一体化设备部件、PLC模块、机器人、变频器模块和指令开关、传感器等,可完成下列机电设备安装和机电一体化技术的工作任务:
★传动装置同轴度的调整;
★供料单元的机械安装与调整;
★加工单元的机械安装与调整;
★装配单元的机械安装与调整;
★分拣单元的机械安装与调整;
★输送单元的机械安装与调试;
★码垛单元的机械安装与调试;
★自动生产线设备安装与调试。
3、本装备用于考核或技能竞赛,可考察的职业能力:
★机械构件的装配与调整能力;
★机电设备的安装与调试能力;
★电路安装能力;
★气动系统的安装与调试能力;
★变频器在自动生产线的使用能力;
★伺服电机在自动生产线的使用能力;
★PLC模拟量控制在自动生产线的使用能力;
★机器人硬件接线实训;
★机器人编程实训;
★机器人与PLC通讯实训;
★机电一体化设备的控制程序的编写能力;
★自动控制系统的安装与调试能力。
★PLC网络的安装、编程与调试能力。
★人机界面、组态技术的编程与调试能力
★符合国家职业技术标准"可编程序设计师三级标准"
五、工业机器人循环生产线实训设备配置
|
序号 |
名称 |
型号及规格 |
数量 |
制造商 |
备注 |
|
1 |
实训桌 |
1998mm×960mm×780mm |
1台 |
|
铝钢结构,带滚轮,作为自动生产线的机械和电气设备的安装载体,各设备可自由、灵活安装。 |
|
2 |
供料单元 |
|
1套 |
|
主要包括竖式料筒,顶料气缸,推料气缸,物料检测传感器部件,安装支架平台,材料检测装置部件等。 |
|
3 |
输送单元 |
|
1套 |
|
主要包括伺服电机及驱动、双机械手,直线运动单元,比例传送机构,多功能安装支架,同步轮,同步带等。 |
|
4 |
加工单元 |
|
1套 |
|
主要包括滑动料台,模拟冲头等。 仿真接口模块和仿真界面显示单元 |
|
5 |
装配单元 |
|
1套 |
|
主要包括供料机构,旋转送料单元,机械手装配单元,放料台等。 |
|
6 |
分料单元 |
|
1套 |
|
主要包括传送带机构,三相电机动力单元,分拣气动组件,传感器检测单元,反馈和定位机构等。 |
|
7 |
机器人码垛单元 |
|
1套 |
|
主要包括码垛机构,机器人单元,气动组件等 见附表一 |
|
8 |
可编程控制器和变频器 |
|
1套 |
西门子 |
见附表二 |
|
9 |
触摸屏 |
MCGS |
1台 |
昆仑通态 |
型号:TPC7062Ti |
|
10 |
气泵 |
W58 |
1台 |
复祥机电 |
静音 |
|
11 |
电源配电系统 |
|
1套 |
|
|
|
12 |
电脑推车 |
|
2张 |
|
|
|
13 |
工具 |
|
1套 |
|
|
附表一 码垛单元配置
|
序号 |
名称 |
型号/规格/编号 |
单位 |
数量 |
制造商 |
||||||||||||||||||||||||||||||||||||||
|
1 |
机器人 |
1.电源:220V±10% 50HZ±1% 2.使用温度:0℃-40℃ 3.最佳环境温度:15℃-25℃ 4.相对湿度:20-80%RH(无结露) 5.气源压力:0.5-0.7Mpa
三、主要技术参数
|
套 |
1 |
ABB |
||||||||||||||||||||||||||||||||||||||
|
2 |
手爪夹具 |
气缸1只;机械配件一套;真空吸盘一只 |
套 |
1 |
|
||||||||||||||||||||||||||||||||||||||
|
3 |
物料台架 |
分3排,每排6个工位,总计18个工位 |
套 |
1 |
|
||||||||||||||||||||||||||||||||||||||
|
4 |
实训桌 |
1000mm*1000mm*760mm |
套 |
1 |
|
附表二 PLC配置,设备的西门子S7-1500可编程控制系统主要部件
|
序号 |
名称 |
型号/规格/编号 |
单位 |
数量 |
制造商 |
|
1 |
可编程控制器PLC |
CPU1516-3PN/DP |
台 |
1 |
西门子 |
|
2 |
数字量输入模块 |
DI32*24VDC HF |
台 |
1 |
西门子 |
|
3 |
数字量输出模块 |
DQ16*24VDC/0.5A HF |
台 |
1 |
西门子 |
|
4 |
可编程控制器PLC |
CPU 1214C/DC/DC主机模块14DI/10DO |
台 |
4 |
西门子 |
|
5 |
数字量输入输出模块 |
SM1223数字量扩展模块16DI/16D0 |
台 |
4 |
西门子 |
|
6 |
工业交换机 |
ZRS108-D24 8口 |
台 |
1 |
|
|
7 |
通信电缆 |
RJ45网线通讯线(3米) |
条 |
6 |
|
|
8 |
变频器 |
S120 0.75KW |
台 |
1 |
西门子 |