PLC�ɱ�̿�����ʵ���Ҽ��
��
һ��PLC�ɱ�̿�����ʵ���Ҹſ�
PLC�ɱ�̿�����ʵ���������ڵ�����Ϣ��רҵ��ʵ���ѧ�����ܿ�֤�����й���,�ɱ�̿�����ʵ���ҵĽ���������ѧ������ʵ���������ٽ�ʵ���ѧЧ��Ϊ��ּ��Χ��Ӧ���ͱ����˲�����Ҫ��Ϊѧ���ṩ��ʵ��PLC�����Ļ���ʵ��ƽ̨��Ϊ��ʦ�ṩ�˽���PLC�����Ŀ�����Ӧ�õȿ��л�������Ӳ��������Ϊ����ʵ���ṩ�˿���ϵ������ʵ��ƽ̨��

SBPLX-01A PLC�ɱ�̿�����ʵѵװ��
�ɱ�̿�������ѧʵ��װ�ü��ɱ������������STEP7V4.0�������������������ʵѵģ�顢ʵѵʵ�����ʵѵ���װ塢����Ԫ����ģ�����һ�塣�ڱ�װ���ϣ���ֱ�۵ؽ���PLC�Ļ���ָ��ѵ�������PLCʵ��Ӧ�õ�ģ�⼰ʵ�����ѵ����װ���䱸����������Ӧ�ù㷺��������S7-200ϵ�У�CPU226����24DI/16DO���ɱ�̿����������������������ģ��EM223��ģ�����������ģ��EM235����PC-PPIͨ�ű�̵��¡�������TP177�����������������첽��������ṩʵѵ�����+24V/1A��+5V/1Aֱ����Դ��
��ʵѵװ���ʺϸ�ְԺУ��ְҵѧУ����У�Ļ����豸��װ��ά�ޡ����缼��Ӧ�á�������������ơ���������Ӧ�á����ӵ���Ӧ����ά��רҵ�ͷǻ�����רҵ�ġ��ɱ�̿���������������������PLC���Ƽ���������PLC����Ӧ�á���ʵѵ��Ҳ�ʺϼ���ѧУ��ְҵ��ѵѧУ��ְ�����ġ�����վ��PLCʵ�١����ܼ������ˡ�
������������
1�������Դ���������ߣ����������ߣ���380V��10% 50Hz
2�������������¶�-10����+40�� ���ʪ�ȣ�85%(25��)
3��װ����������500VA
4���� ������110Kg
5�����γߴ磺1600mm��750mm��1600mm
6����ȫ����������©��ѹ��©���������ر���װ��
����ʵѵװ�õĻ������ü�����
1��ʵѵ������������˫���ǹ��������ܽṹ�����ҷ�ʵѵģ�飬���û��ۣ�ģ����ʵѵ���Ͽ�������λ��
2��ʵѵ������ľ�ṹ������Ϊ������ĥ�������������з��ù��߳��롢�����С���ʾ����塣
3�����װ壺����֪ʶ��Ȩ������ʵѵ�壬�ṹ���ʵѵʱ����Ԫ��������˿�̶���ֻ��һ��һ���������ι̶������װ��ϣ�ʡʱʡ��������ݡ�
4�����ƹ�
��1��������Դ���Ƶ�Ԫ
��������380V������Դ���������غ��װ�ù��磬������ѹ����ص�����ѹ�����д��Ʊ���˿�������������Ĺ�����Կ���غ���ͣ���ؿ��ƣ�ͬʱ����©��澯ָʾ���澯��λ��
�ṩ��������380V������220V��Դ��һ�飬����ͣ���ؿ�������������б���˿������
��2����ʱ���汨����¼��
��ʱ���汨����¼�ǣ�ƽʱ��ʱ��ʹ�ã������趨ʱ�䡢��ʱ�������жϵ�Դ�ȹ��ܣ������Զ���¼���ڽ��������������ɵ�©��澯������
��3��ֱ����Դ��ֱ����ѹ/���������������ָʾ��
ֱ����ѹ��0��10V�ɵ������ֱ��������4��20mA��ֱ�����ֵ�ѹ��/����������ѹ������0��200V�������迹Ϊ10M��������0.5��������������0��200 mA������0.5����ͬʱ��������ƽ������㶯��������������ƽָʾ��LED����ܡ�����ָʾ���������С�ֱ��24V�̵������ź�ת�������ɡ�
��4������ʵѵ���
����������S7-200SMARTϵ������(ST40)����������һ�����ں�һ�����ڣ�����������I/O��24DI/16DO����EM AM06ģ�����������ģ�飨4AI/2AO����
5��ʵѵģ�����
|
��� |
��� |
���ƶ���ʵѵģ�� |
ʵѵ��ѧĿ�� |
|
1 |
SX1 |
����ʵ�� |
PLC����ָ��ʵѵ������PLC������ָ��ı�д������ |
|
2 |
SX2 |
ʮ��·�ڽ�ͨ��
|
ͨ��ʮ��·�ڽ�ͨ�ƵĿ������ս�ͨ�Ƶ�PLC�������� |
|
3 |
SX3 |
����֮��
|
ͨ��PLC��������֮������PLC��ʱ�����÷� |
|
4 |
SX4 |
�Ľڴ��ʹ�
|
ͨ���Դ��ʹ���ͣ������״̬�Ŀ��ƺͶԻ������Զ�����װ��ϵͳ�����������Ŀ��ƣ����սϸ���������ָ��ı�д������ |
|
5 |
SX5 |
�������
|
ͨ���Բ�������Ŀ����˽ⲽ�������������� |
|
6 |
SX6 |
�¶ȿ���
|
ͨ�����¶ȿ���ģ��Ŀ����Ͻ�ģ���������ݴ��� |
|
7 |
SX7 |
ֱ���������
|
ͨ��ֱ�����ʵ������ֱ��������Ʒ��� |
|
8 |
SX8 |
ֱ���˶�
|
ͨ����ֱ���˶��Ŀ����˽���������ʱ��λ�ÿ��� |
|
9 |
SX9 |
ʮ��·�ڽ�ͨ�� |
ͨ����ʮ��·�ڽ�ͨ��·���źſ��ƣ�����˳�����ָ��ı�д������ |
|
10 |
SX10 |
��е�ֿ��� |
ͨ���Ի�е��ͣ����λ�����Ŀ��ƣ�����һ��������ҵӦ��ϵͳ�еĽϼ������Ƴ���ı�д������ |
�ġ�ʵѵ��Ŀ
��1��PLCʵѵ
1.PLC����ָ��ʵѵ
2.ʮ��·�ڽ�ͨ��
3.����֮��
4.���
5.�Ľڴ��ʹ�
6.��������
7.ֱ���˶�
8.�¶ȿ���
9.ֱ���������
�塢�ɱ�̿�������ѧʵ��װ�������嵥
|
��� |
��� |
���ƶ���ʵѵģ�� |
ʵѵ��ѧĿ�� |
|
1 |
SX1 |
����ʵ�� |
PLC����ָ��ʵѵ������PLC������ָ��ı�д������ |
|
2 |
SX2 |
ʮ��·�ڽ�ͨ�� |
ͨ��ʮ��·�ڽ�ͨ�ƵĿ������ս�ͨ�Ƶ�PLC�������� |
|
3 |
SX3 |
����֮�� |
ͨ��PLC��������֮������PLC��ʱ�����÷� |
|
4 |
SX4 |
�Ľڴ��ʹ� |
ͨ���Դ��ʹ���ͣ������״̬�Ŀ��ƺͶԻ������Զ�����װ��ϵͳ�����������Ŀ��ƣ����սϸ���������ָ��ı�д������ |
|
5 |
SX5 |
������� |
ͨ���Բ�������Ŀ����˽ⲽ�������������� |
|
6 |
SX6 |
�¶ȿ��� |
ͨ�����¶ȿ���ģ��Ŀ����Ͻ�ģ���������ݴ��� |
|
7 |
SX7 |
ֱ��������� |
ͨ��ֱ�����ʵ������ֱ��������Ʒ��� |
|
8 |
SX8 |
ֱ���˶� |
ͨ����ֱ���˶��Ŀ����˽���������ʱ��λ�ÿ��� |
|
9 |
SX9 |
ʮ��·�ڽ�ͨ�� |
ͨ����ʮ��·�ڽ�ͨ��·���źſ��ƣ�����˳�����ָ��ı�д������ |
|
10 |
SX10 |
��е�ֿ��� |
ͨ���Ի�е��ͣ����λ�����Ŀ��ƣ�����һ��������ҵӦ��ϵͳ�еĽϼ������Ƴ���ı�д������ |
��ѧʵ��ģ�ͣ�
1.ʮ��·�ڽ�ͨ��ʵ��ģ��
��
һ�� ��Ʒ�ص㣺
ʮ��·�ڽ�ͨ��ʵ��ģ��"�DZ���˾����ʵ��ʮ��·�ڽ�ͨ�ƣ�����һ��������С���Ŀ������������ķ�ʵ��ģ�͡�ʵѵ�������㣬���������רԺУ�Կɱ�̿����������Ľ�ѧ���γ���ƺͱ�ҵ���Ҫ��
��ʵ��ģ���ɵ�·ģ�͡���ͨ��ָʾģ�͡���Դ���루DC+24V����ģ�����롢���������PLC�������û����䣩����Ӧ�Ŀ���������ɡ�

��ͼƬ���ο�����ʵ��Ϊ��
ʮ��·�ڽ�ͨ��ʵ��ĵ�·����Ϊ�ĸ�����˫������������ͬ�����ֱ�������·���ͷ��������������⣬�ڵ�·ģ���ܱ���ע�п������Լ���ƺ��ģ�ⳡ����ʹ����ģ����������棻��ͨ��ָʾģ�Ͳ�������ʽ˫ɫLED��ͷָʾ�ƣ�ָʾ�Ƶ����Ӳ����˸�ǿ���������þ����ã�����������������ʵ�Ľ�ͨ������ģʽ���ĸ�����ֱ�����һ��LEDָʾ�ƣ��������ij�������ָ�ӡ���������ֱ�Զ����ϱ��ĸ��������ת��ֱ�к���ת����ʵʱ���ƣ�ʵѵ�߸���LEDָʾ����ʾ�Ļơ��̡������ֲ�ͬ���ź�ָʾ״̬���ս�ͨ�ƹ������������̣�ʹʵѵ���ܽ����ۺ�ʵ�ʲ��������Ľ��������
2.SBMRW-05ƽ���ά�˶�����ʵѵװ��
��
һ��ϵͳҪ��
ƽ���ά�˶�����ʵѵ�豸Ҫ�����á������������ơ��������ؼ����������˶����ơ�����������ơ�������������ơ������ɱ�̿�������������������һ�廯ϵͳ������������ƹ��̡������Կ�ԭ�����ȶ���γ̡�Ҫ��������µ��˶����Ƽ���������һ���˶����Ʋ�Ʒ��װ��Ҫ������������ŷ��������������������ʽ���̨��X-Y�˶�ƽ̨�ͱ��������
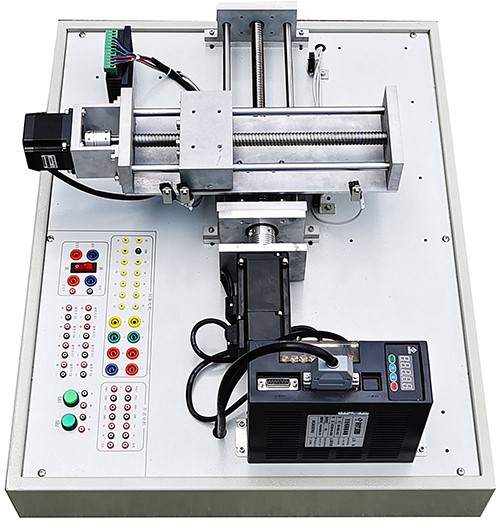
�ο�ͼ
����Ҫ�����ʵѵ��Ŀ
1) �ŷ�ϵͳ����ɺͻ�������
2���ŷ���������������
3���ŷ���������λ�ÿ���ģʽ
4���ɱ�̿�����ָ����
5�����ᶨλ�˶�����
6����ά˫�ᶨλ�˶�����
��������Ҫ��
1��������Դ������220+15% /50HZ�����й���������
2�����������������¶�Ϊ-10��- +40�� ���ʪ��<5% (25��) ����<4000m��
3��������������1KVA
4��װ����������60kg��
5���ߴ磺��С��700*450*220mm
�ġ�װ�õĻ���Ҫ��
1�����Ͳİ�װ�װ��֧�ܣ�
�ṹҪ�����̼�ֲ����������ߴ磺��*��*�� 500*450*100mm��
2������˿����ֱ������ɵ�X-Y���˶�ƽ̨��
����˿��װ��Ҫ����ù�ҵ����Ʒ����е���ȸߣ�ֱ��16MM��ֱ����Ҫ����ù�ҵ����Ʒ�����ø����ܻ���2������Ч�г�Ϊ200�L��ƽ̨�ߴ�Ҫ��*��*�ߣ��γ�+360��*300*150�L��
3��������
����֪��Ʒ���������������������������̬��
�塢ƽ���ά�˶�����ʵѵ̨��Ҫ�����嵥
|
��� |
���� |
�ͺ� |
���� |
��λ |
��ע |
|
1 |
���������� |
|
1 |
̨ |
|
|
2 |
������� |
|
1 |
̨ |
|
|
3 |
�˶����� |
|
2 |
�� |
|
|
4 |
�������ܻ��� |
|
1 |
�� |
|
|
5 |
���߶����� |
|
1 |
�� |
|
|
6 |
���Կ��� |
|
2 |
�� |
|
|
7 |
�ŷ���� |
|
1 |
̨ |
|
|
8 |
�ŷ������� |
|
1 |
̨ |
3.SBMRW-05��ά�˶�����ʵѵװ��
��
һ��ϵͳҪ��
��ά�˶�����ʵѵװ��Ҫ�����á������������ơ��������ؼ����������˶����ơ�����������ơ�������������ơ������ɱ�̿�������������������һ�廯ϵͳ������������ƹ��̡������Կ�ԭ�����ȶ���γ̡�Ҫ��������µ��˶����Ƽ���������һ���˶����Ʋ�Ʒ��װ��Ҫ������������ŷ��������������������ʽ���̨��X-Y�˶�ƽ̨�ͱ��������

�ο�ͼ
����Ҫ�����ʵѵ��Ŀ
1) ����ϵͳ����ɺͻ�������
2��������������������
3��������������λ�ÿ���ģʽ
4���ɱ�̿�����ָ����
5�����ᶨλ�˶�����
6����ά��λ�˶�����
��������Ҫ��
1��������Դ������220+15% /50HZ�����й���������
2�����������������¶�Ϊ-10��- +40�� ���ʪ��<5% (25��) ����<4000m��
3��������������1KVA
4��װ����������60kg��
5���ߴ磺��С��700*450*220mm
�ġ�װ�õĻ���Ҫ��
1�����Ͳİ�װ�װ��֧�ܣ�
�ṹҪ�����̼�ֲ����������ߴ磺��*��*�� 500*450*100mm��
2������˿����ֱ������ɵ�X-Y���˶�ƽ̨��
����˿��װ��Ҫ����ù�ҵ����Ʒ����е���ȸߣ�ֱ��16MM��ֱ����Ҫ����ù�ҵ����Ʒ�����ø����ܻ���2������Ч�г�Ϊ200�L��ƽ̨�ߴ�Ҫ��*��*�ߣ��γ�+360��*300*150�L��
3��������
����֪��Ʒ���������������������������̬��
�塢��Ҫ�����嵥
|
��� |
���� |
�ͺ� |
���� |
��λ |
��ע |
|
1 |
���������� |
|
3 |
̨ |
|
|
2 |
������� |
|
3 |
̨ |
|
|
3 |
�˶����� |
|
2 |
�� |
|
|
4 |
�������ܻ��� |
|
1 |
�� |
|
|
5 |
���߶����� |
|
1 |
�� |
|
|
6 |
���Կ��� |
|
2 |
�� |
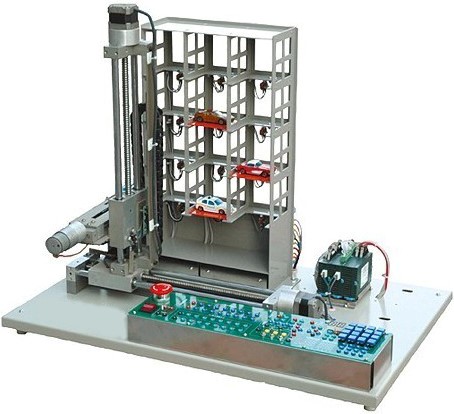
4.SBMCK-03D������ֿ�ʵ���ѧʵѵװ��
��
һ��ϵͳ����
����ֿ�ʵ���ѧʵѵװ�ã��ɹ�ѧ�����ֱ��������ơ�����������ơ�PLCָ��ѵ����λ��ѵ������������⼼���ȷ����ʵѵʵϰ���γ���Ƶ�ʹ�á�
�������ܣ�
��1���������͵�ָ��λ�ã��ɲ���Աָ����λ�ã�
��2���Զ��������͵�ijһλ�ã���PLC�ж�λ�ã�
��3����ijһ�ֿ�Ļ���ȡ�����ɲ���Աָ��λ�ã�
��4���Զ�ȡ��ijһ�ֿ�Ļ����PLC�ж�λ�ã�
��5���ܹ�ʵ�ֵ�������-��������-����ͣ���Ĺ���
������Ʒ�ص�
1����װ��������ֿ����塢�ӿڵ�·����ɡ����峵�������ɵ��̡�����ʮ��λ���塢������е���������Ƶ��IJ�����ɡ�
2��ģ�͵Ĵ�����е���ֲ��ù���˿�ܡ����졢��ͨ˿�ܵȻ�еԪ����ɣ����ò��������Ϊ�϶�Ԫ����
3����ģ�Ͳֿ����������ʮ����λ��ɣ���PLC���ʵ��X��Y��Z��λ�ÿ��ƣ�����ɲֿģ���Զ����ֶ���ȡ��
1�����ÿɱ����������ʵ��X��Y��Z�����λ����������������ȷ����ѧ���������ʱ����ϵͳӲ����
2������ʽ�ӿ���ƣ����˼���ʵѵʹ�á�
3��ͨ���������źŲɼ���PLC��̣�ʵ�ֶԲ��������ֱ��������и��ӵ�λ�ÿ��ơ�ʱ�������Ƽ���λ����صȹ��ܡ�
4�����ù���˿�ܡ�ֱ�ߵ��졢��ͨ˿����Ϊ����װ�á�
5) �����ѹ��AC 200V-240V ������������о���������ĵ���<250W��
�����Lh ��290mm
�����Lv ��290mm
�ظ����ȣ�0.1mm
4�����γߴ磺600��450��600mm(L��W��H)
����ʵ����Ŀ
1��PLC����ָ��ѵ��
2��PLC��ָ��ѵ��
3����λ�����ٿ���ѵ��
4���ֿ����ѵ��
5����λ����������ѵ��
�ġ�����ֿ�ʵ���ѧʵѵ�豸��Ҫ�����嵥
|
��� |
���� |
�ͺ� |
���� |
��λ |
|
1 |
���������� |
|
2 |
̨ |
|
2 |
������� |
|
2 |
̨ |
|
3 |
�˶����� |
|
2 |
�� |
|
4 |
�������ܻ��� |
|
1 |
�� |
|
5 |
���߶����� |
|
1 |
�� |
|
6 |
���Կ��� |
|
2 |
�� |
|
7 |
��� |
10����λ |
1 |
�� |
|
8 |
�������� |
|
1 |
�� |
|
9 |
��צ |
|
1 |
�� |
|
10 |
��ŷ� |
|
2 |
�� |
5.�IJ����ʵѵģ��
��
һ���IJ����ʵѵģ�ͼ��
ϵͳ�ɻ�е�����͵���������������ɣ���е���ֿ����ŵĿ����պͽ���������ƶ������Ʋ�����PLC���Ƹ���ܿ��غ�ָʾ�ƣ�����ɵ��ݵĸ������
���ݵĵ�������ϵͳ����������PLC���ܿ��ƣ�Ҳ���Բ������⣩�������Զ�ƽ�㡢�Զ����š���ѡ���ƹ��ܡ�˳����Ӧ����������źš�ֱʻ�����ݰ�ȫ���б����������ȹ��ܡ��Ҿ������ܿɿ�������ƽ�ȡ��������ܺĵͺͱ��ڽ�ѧ���ص㡣��ģ�������չ��Ƭ���ӿڣ�Ҳ����˵�����ͨ����Ƭ�����ƣ�ʵ����һ��ϵͳ���ֽ�ѧ��;��

ϵͳ���ɣ�����ģ�Ͱ�����������������ء����졢���е��¡����š��ٻ���ť��¥����ʾװ�á����ᡢ�����Ż�����ƽ��װ�á�������ָ��ơ���������������ϵͳ�ȡ�
��.���ݵ���Ҫ��ɲ���
1.ק������ק�����ǵ��ݵ�����װ�ã�����Ҫ�����������������ק���֣�ק�����ϵ�������Ϊק���֡����˽���ק�����ֱ����ҽ�������ؿ飬������ק������ק���ֲۼ�ľ�Ħ������ʵ�ֽ�����������������֣�Ϊ��֤����˺����ض�ק�������Դ�ֱ�ڽ���Ͷ��أ��ұ���ƽ�У�����֤ק�������㹻��İ��ǣ���һ�㳣���õ����֣��׳ƿ����֣���
2.��������ɽ���ܡ����������ɡ���������;��ͬ�����ߴ���������Ʋ�ͬ��
3.���죺����ͨ������֧�ܱ��̶��ھ������ϣ������λ�����˽���Ͷ��ص�λ�ã������ǽ����������еĹ����
4.����װ�ã�����װ���ɶ����֡����ؼܡ������ȡ�ק��������ɡ�����������������ƽ�����á�
5.��λ���أ���װ�ÿ���װ�ڽ����ϣ�Ҳ����װ�ڵ��ݾ����϶�վ���¶�վ���������������г�����վʱ�������жϵ�Դ�İ�ȫװ�á�
6.���݃Ⱥ���ť���ڱ���ѧ�����У����݃Ⱥ���ťװ�ڵ���ģ���������Ͻǣ�����ָ����Ҫ�����¥�㣬��������ʾ���ݽ�������λ�ú����з���
7.¥����ʾ��������װ�ڵ���ģ�������Ҳ࣬ͨ�������������ϻ����¼�ͷ�İ�ť�����ý��ᵽ�������ڵ�¥�㣬��������ʾ���ݽ�������λ�á�
��.���ݿ���ԭ��
1.����ѧ������һ���ɳ˿��Լ��������Զ�����ģ�͡�¥����ʾ�����ڵ����Ҳ࣬���ڶ���͵ײ�ֱ�����һ�����Ϻ����µ��ٻ���ť��������¥�㰴ť��������������վ�����������ٻ���ť�����Ͻǵĵ��݃Ⱥ���ť�����������ȵ���Ӧָ�ť�����������ij˿Ͱ���ָ�ťʱ��ָ���źű��Ǽǣ����ȴ�������ij˿Ͱ�������¥�㰴ťʱ�����źű��Ǽǡ��������������еĹ����а��Ǽǵ�ָ���źź����ϵ��ٻ��ź���һ����ͣ����ֱ���źŵǼǵ���߲�վ��Ȼ���ַ����������У�˳����Ӧ����ָ���źź��ٻ��źŸ���ͣ����ÿ��ͣ��ʱ�������Զ����м��١�ƽ�㡢���š����˿ͽ���������Ϻ������й��ţ�ֱ��������һ����������ź��ٳ��֣�����ݸ����ź�λ��ѡ���������������С�������ָ������ͣ�������ͣ���IJ�¥��
2.�Զ������ţ�����������ƽ��ʱ������ƽ���ӳٺ��Ż��������Զ����ţ����ſ���λ�ǣ��ſ���λ���ض������Ż�ֹͣ�����ݿ�¥�㿪�ź���Լ2����ʱ���ŵ������ŷ�����ת�����Źص�λʱ���Źص�λ���ض������Ż�ֹͣ�������˿Ͱ��¹��Ű�ťʱ���ݾ����̹��š�������ͣ��ij�����Źرգ����¸ò��ٻ���ť�����Ž�����
3.���ݵ����������ٺ���������
���ݵ�������PLC����Ƶ��������ƶ�����ͬ���ơ�����PLC����ָ���ź�ȷ��������Q1.4����������½���Q1.5�������ָ�Ȼ���������½����ٶȿ���ָ��ݸ���Ƶ����Ӧ��������ת��Ԥ���ٶȣ�������բָ�������ƶ���ʹ�ƶ�����բ�ɿ�����Ƶ�������ڲ��趨Ԥ���ٶȿ��Ƶ��ݵ����������ٺ��������С�
�ģ�ʵ��������
�塢ʵ��Ŀ��
1.�˽���ݵĻ����ṹ�Ͷ���ԭ����
2.���ղ���Զ��I/Oͨ������ϵͳʵ���˵��ݵ�PLC���ơ�
3.����PLC���ƵĻ���ԭ��, ���������첽�綯������Ƶ����������������ƽ�㶨λ������ת���������������ټ������壩��ԭ����ʹ�á�
�桢ʵ������
1��ʵ�鲽�輰���Է���
��1�����IJ����ʵѵģ�͵ij������ص�PLC�����ս���ͼ��PLC����������߽ӽӵ�����ϣ�������������ϵ������
(2)�ѿɱ�̿���������RUN��,�����ݽ���ͣ����һ�㡣��һ��"¥����ʾ��"�����һ����¥��ť������ʾҪ�������ݣ�������û����һ¥������һ�㰴��һ����¥��ť��������½�������λ���ٿ��š�����һ��¥�����ݽ��Ŵ���"���݃Ⱥ���ť"�µİ�ť�а�����Ҫ�����¥�㣬¥��ָʾ�ƻ������������Ű�ť�������űպϡ����Ὺʼ��������"¥����ʾ��"�л���ʾ��ʱ���ݽ�������¥�㡣����������ָ����¥��ʱ�������Ż����һ�����Զ��պϡ�
��3��������¥�ɰ���¥����¥��ť�����ݽ���ᵽ�����ڲ㣬Ȼ������Ŵ��ٰ�����Ҫ�����¥�㣬�����¹��Ű�ť�����ݽ��Źرգ����ݽ��Ὺʼ�������½�������ָ��¥����Ŵ���һ�����Զ��رա�
��4���ڵ��ݽ������й����У��������������½���;�У��������½�������������������źŻᰴ��˳��������Ӧ�������ٻ��źš����磬���ݽ�����һ¥������������¥�Ĺ����У�����¥������������ť�ٻ���ͬʱ���ж����½���ť�ٻ������ݽ��������������������Ӧ����������ť�����������ٻ��źš�����Ӧ�IJ�Ⱥ���ť��������½�����¥��Ӧ������¥��ť����ֻ�������Ӧ��¥����ݽ����Ż��������ִ�������һ��ָ���ͣ��ʱ����ʱ���г˿ͽ�����ᣬ����ָ���źſ����Ⱦ����������з���
��5������δƽ�������ʱ�����Ű�ť���Ű�ť���������á�ƽ���ҵ��ݽ���ֹͣ���к����Ű�ť�����Ŵ�������ť�����Źرա�
2�����IO���䣨��Դ�ź����24V/0V��
|
��� |
��ʶ |
���� |
��� |
��ʶ |
���� |
|
1 |
Q1 |
1��������а�ť�ź� |
10 |
Q10 |
4��ƽ���ź� |
|
2 |
Q2 |
2��������а�ť�ź� |
11 |
Q11 |
����״̬ |
|
3 |
Q3 |
2��������а�ť�ź� |
12 |
Q12 |
����״̬ |
|
4 |
Q4 |
3��������а�ť�ź� |
13 |
Q13 |
1���ں���ť�ź� |
|
5 |
Q5 |
3��������а�ť�ź� |
14 |
Q14 |
2���ں���ť�ź� |
|
6 |
Q6 |
4��������а�ť�ź� |
15 |
Q15 |
3���ں���ť�ź� |
|
7 |
Q7 |
1��ƽ���ź� |
16 |
Q16 |
4���ں���ť�ź� |
|
8 |
Q8 |
2��ƽ���ź� |
17 |
Q17 |
���Ű�ť�ź� |
|
9 |
Q9 |
3��ƽ���ź� |
18 |
Q18 |
���Ű�ť�ź� |
3������IO���䣨��Դ�ź����룩
|
��� |
��ʶ |
���� |
��� |
��ʶ |
���� |
|
1 |
I1 |
1��������а�ťָʾ�� |
8 |
I8 |
2���ں���ťָʾ�� |
|
2 |
I2 |
2��������а�ťָʾ�� |
9 |
I9 |
3���ں���ťָʾ�� |
|
3 |
I3 |
2��������а�ťָʾ�� |
10 |
I10 |
4���ں���ťָʾ�� |
|
4 |
I4 |
3��������а�ťָʾ�� |
11 |
I11 |
���ݿ��� |
|
5 |
I5 |
3��������а�ťָʾ�� |
12 |
I12 |
���ݹ��� |
|
6 |
Q6 |
4��������а�ť1��������а�ťָʾ�� |
13 |
Q13 |
�������� |
|
7 |
Q7 |
1���ں���ťָʾ�� |
14 |
Q14 |
�������� |
�塢���ܵ��ݿ�����
1�����ܵ��ݿ���ϵͳ��Һ��������ģ�顢ָ��ģ�顢ˢ��ģ�鼰���ݿ�������ģ����ɣ�ģ��¥���Զ�����ʵ�����ܳ��ݷ����û�����
2����ɲ��֣�
1��Һ������12864Һ��������ʵ���ݵ�ǰ����¥��״̬�����ϣ���ʵ��ָ�ƹ�������ָ��¼��ȹ���
2��ָ��ģ���¼����ǧ��ָ�ƣ�������С�����칫¥�����Ӧ��
4������ģ���ʵ���ֻ����ݡ��ֻ��鿴����¥�㼰״̬�������ڵ������黷�����Ӵ�����
5) ˢ��ģ���ʵ��IC��������ˢ��¥���Զ�������������ҵ�Ĺ�������ֹİ���˽�ȥС��
6) ���Բ���PLC��ST60������ϵͳ���Ե��ݽ��б�̿��ƣ����Բ��ò�ͬƷ�Ƶ�PLC��������
6.SBCC-03�����峵��ʵѵģ��
���峵��ʵѵװ��Ϊʵ���Զ�����ϵͳ������ʹ�ÿɱ�̿��������ƣ�����12����λ����X��Y��Z������������ȷ������ֱ����������Զ������ȡ������ij�Ʒ�����Ƶ�ִ�л�����ʵ���ִ�����ϵͳ���Զ��洢ϵͳȫ���������̡�PLC�û��Ա���

�ο�ͼƬ
1�����峵��ʵѵ�豸��������
��Դ������AC220V��50Hz
���ʣ�<200W
�ߴ磺��С��600*400*500mm
2�����峵��ʵѵ�豸�ṹ��
����ʵѵװ��̨��Ϊ�����ṹ��ʵѵ����װ�ø�����ģ����밲ȫ�������ӣ�ʹ�ô���ȫ��ͷ�ĵ��߽��е�·���ӣ���ָ��ء���翪�ء���������ָʾԪ���ĵ�·����ͨ�������Ž������ӡ���������ӵ�·��������ӵ�·���ϣ��ȱ�֤ѧ���������ܵ�ѵ�����γɺ��̣��ֱ�֤��·���ӵĿ��١���ȫ�Ϳɿ���
3�����峵��ʵѵ�豸�ص㣺
1���ֶ�/�Զ�����ģʽ�����Ӳ����⼰����У�顣
2�����ŵ�ִ�л������ɸ��ݲ�ͬ�Ŀ��Ʒ�����̣����ɲ�ͬ��ִ��ϵͳ����Ӧ��ͬ��ε���Ա����PLCѧϰ�ͱ�̡�Ҳ����Ϊ������ƻ��о�ʹ�á�
3����ƷΪ����ʽ�������е���������ɼ���
4������ʵѵ��Ŀ��
���峵��ʵѵ�豸��������
7����е��װ�õĻ�е��װ��λ�õ�����
8������������Ԫ���IJ��ߣ�ִ�е����ѡ�ã�
9������������翪�ص�ѡ����Ӧ�ã�
10��PLC��PLC�����������ı�̼�Ӧ�á�
|
��� |
���� |
�ͺ� |
���� |
��λ |
|
1 |
ֱ����� |
|
2 |
̨ |
|
2 |
���� |
12����λ |
1 |
̨ |
|
3 |
�˶����� |
|
2 |
�� |
|
4 |
�������ܻ��� |
|
1 |
�� |
|
5 |
���߶����� |
|
1 |
�� |
|
6 |
���Կ��� |
|
8 |
�� |
|
7 |
�м�̵��� |
|
4 |
�� |
|
8 |
�������� |
|
1 |
�� |
|
9 |
��ŷ� |
|
2 |
�� |
7.SBMJX-01��е��ʵѵģ��
��
һ�����ܸ���
��е�۽�ǰһ����վ�ϵĹ���ץ�����͵���һ����վ����е��˫�����ס����˻������ס���ת����������צ�Ȳ�����ɣ�ͨ����ת�ƶ�������������ץȡ�ȶ�������ǰһվ�ϵĹ���ץ�����͵���һ����վ��

�ο�ͼ
����������ϵ���ʽ��
����վ���ӹ�վ
���ϼ��վ������վ
����վ�����ʹ�ģ��
����վ�������վ����
����ϵͳ���ɣ�
1.���Ͻ�װ�
2.I/O���߶���
3.���˵�ѹ���
4.��ŷ�
5.��ת����
6.˫������
7.�����ͻ�������
8.������ָ
9.֧�����
�ġ��������ݣ�
1��������Դ������220+15% /50HZ�����й���������
2�����������������¶�Ϊ-10��- +40�� ���ʪ��<5% (25��) ����<4000m��
3��������������1KVA
4��װ����������60kg��
5���ߴ磺��С��700*450*300mm
�����嵥��
|
��� |
���� |
�ͺ� |
���� |
��λ |
|
1 |
�������ܻ��� |
|
1 |
�� |
|
2 |
��ŷ� |
SMC 24V |
3 |
�� |
|
3 |
˫������ |
SMC |
1 |
�� |
|
4 |
�������� |
SMC |
1 |
�� |
|
5 |
��צ |
SMC |
1 |
�� |
|
6 |
���Կ��� |
SMC |
6 |
�� |
|
7 |
��̨ |
|
1 |
�� |
|
8 |
��ѹ�� |
|
1 |
�� |
|
9 |
˵���� |
ʵ��ָ���� |
1 |
�� |
�塢��е��ʵѵ�豸��Ҫ�����嵥
����ʵѵ��Ŀ
1.�˽������Ӧ��
2.�˽�����Ԫ���Ľṹ
2.��������ϵͳ��װ����
4.��еϵͳ��װ����
5.ϵͳά�����ϼ�⼼��
6.���յ�������������
8.SBMYD-03��С���˶�����ģ��
һ������
С���˶�����װ�ò���̨ʽ�ṹ����һ��ҵ�Զ���������С���˶����ƹ��̵���ģ�ͣ���װ�ò���ֱ�����˿�ܵ��촫��ϵͳ��ʵ�ִ����Ͷ�λҪ�����;�����������ա������ᡢ������ã�����ֱ��������Ƹ���������������������֤ϵͳ�ȶ������ܺͿ����Ӧ�������г̷�Χ400MM��װ��4�ִ������������ƣ����������רԺУ�ɱ�̿����������Ľ�ѧ���γ���ƺͱ�ҵ��ơ�
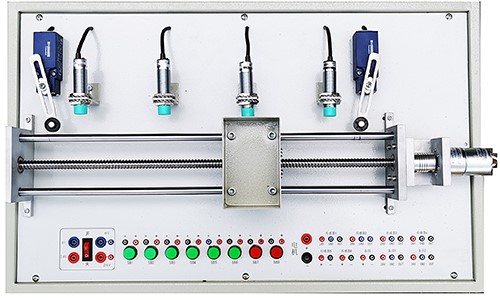
�ο�ͼƬ
������������
1��������Դ������220+15% /50HZ�����й���������
2�����������������¶�Ϊ-10��- +40�� ���ʪ��<5% (25��) ����<4000m��
3��������������1KVA
4��װ����������60kg��
5���ߴ磺��С��800*400*220mm
�����豸�ṹ��
ʵѵװ��̨��Ϊ�����ṹ��ʵѵ����װ��PLCģ���I/O ���ӡ�������ģ����PLC�����Ӷ��ӣ����밲ȫ�������ӣ�ʹ�ô���ȫ��ͷ�ĵ��߽��е�·���ӣ���ָ��ء���翪�ء���������ָʾԪ���ĵ�·����ͨ�������Ž������ӡ���������ӵ�·��������ӵ�·���ϣ��ȱ�֤ѧ���������ܵ�ѵ�����γɺ��̣��ֱ�֤��·���ӵĿ��١���ȫ�Ϳɿ���
�ġ�����ʵѵ��Ŀ��
1�������豸�İ�װ�����
��1������װ��ͬ��ȵĵ���
��2�������豸��װ�����
2���������Ƶ�·�İ�װ��PLC���
��1���綯������ת���Ƶ�·������������д
�塢С���˶�����ʵѵװ����Ҫ�������ñ�
|
�������ܻ��� |
|
1 |
�� |
|
ֱ����� |
24V 200r/Min |
1 |
ֻ |
|
������ |
LJ8A3-2 |
1 |
ֻ |
|
���ݴ����� |
LJC34A4-K |
1 |
ֻ |
|
��紫���� |
ST135������ |
1 |
ֻ |
|
����˿�� |
|
|
|
|
�г̿��� |
CX19-001 |
1ֻ |
|
|
������� |
���㱾����ʹ��Ҫ��֮��� |
1 |
�� |
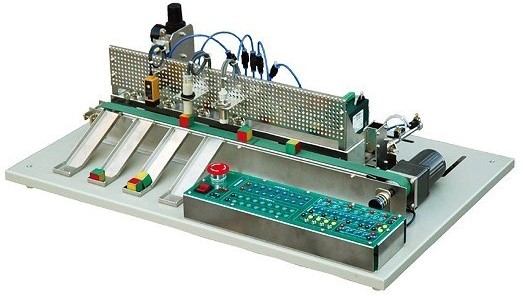
9. ���Ϸּ�ģ��
��
һ�����Ϸּ�ģ�ͼ��
���Ϸּ�ģ�Ͳ���̨ʽ�ṹ������PLC ���������ཻ���綯�������ס���ŷ�����ת�������Ȳ�����ѡ������ɫʶ�������Բ�ͬ�������еĵ���ʽ�͵��ʽ���������ֱ�̶��������ϡ���װ�ú��� PLC����������������������������λ�ÿ��Ƽ��������ݣ�������ѧ��PLC ��̼�ϵͳ���ԣ����մ�����ʹ�á������������������Ƶȼ�����
������Ҫ�������ñ�
|
ģ�� |
��� |
ʵ������ |
|
����ָ��Ӧ�� |
1 |
�������ָ����� |
|
2 |
˳�����ָ����� |
|
|
PLC�ĸ��ټ�������Ӧ�� |
1 |
���������е�һ����������ָ���ֿ� |
|
2 |
�����������ĸ����ﰴ����˳�����벻ͬ�IJֿ� |
|
|
��������⼼�� |
1 |
�뵼��ɫ��������Ӧ�� |
|
2 |
���ʽ������Ӧ�� |
|
|
3 |
����ͬ���ʵIJ�������ָ���ֿ� |
|
|
4 |
����ɫ���ʻ���ּ����������ָ���ֿ� |
10����Ƶ��ѹ��ˮ����ʵ��ģ��
��
1. ��Ʒ�ص�
��Ƶ��ѹ��ˮ����ʵ��ģ��"�����Ƶ���ټ��������������ƣ����ǽ�����ʶ������ǿ�������£��ɱ���˾�������ƿ����������豸����ģ�Ϳ�ģ��סլС�����߲㽨�������������ˮϵͳ��ģ����Ҫ�ɱ�Ƶ����ˮ�á�ѹ������������ˮ�ء�ˮ��ͷ���豸���ɣ��ܹ���ɳ���ĵ����Ƶ���١���̬ѹ����ֵ���ơ���̬��Ƶ��ѹ��ˮ��ʵѵ��Ŀ��
���ɹ㷺Ӧ���ڱ���˾���������б�Ƶ��ʵ���������б�Ƶ����PLC���̵�Ӵ���ʵѵ�����ʵѵװ���С�
����������V20ϵ�и����ܱ�Ƶ��������������������0.37KW������RS485ͨ�Žӿڣ��ṩBOP������壻��������V/F���ơ�ƽ��V/F���ɱ�̶���趨v/f���ƣ���ͨ�������ƣ�FCC���ȶ��ֿ���ģʽ����������������3����ģ��������1����ģ�������1�����̵������1�������й���ѹ��Ƿ��ѹ��������Ƶ����������±������ӵع��ϱ�������·�����ȱ������ܡ�

��ͼƬ���ο�����ʵ��Ϊ��
2 �� ��������
1��������Դ������AC220V��10%/50Hz��
2�������������¶�+3��-+45�������ʪ��<85%(25��)������<4000m��
3����Ƶ��Χ��25Hz-50Hz��
4�����γߴ磺500mm��375mm��1700mm��
5��ѹ�����Ʒ�Χ����ѹ����4-12kPa����ѹ����10-35kPa��
11.���ܻ����˿���
��ҵ�������ǵ��͵Ļ���һ�廯���ֻ�װ�������ĵ����ͻ�����ѧ�Ľ�������չ���� 20���������Զ����������˵�����ijɾ͡�Ŀǰ����ҵ�������������������㲿������ҵ�������ӹ�ҵ���������Ϲ�ҵ�����ӵ�����ҵ��ʳƷ��ҵ�������еõ��˹㷺��Ӧ�ã���Ϊ��ҵ��������������ҵ��Ա����Ҫ�Թ�ҵ�����˵ķ�չ����ṹ�бȽ��������˽⣬��������ҵ������Ӧ����ά����ְҵ��ͬ�С�
��ʵѵ̨�Ի�����ģ��Ϊ���ģ�����PLC���ƣ���ҵ�������Ի����ĵ�ʾ�̡�ֱ�ߡ����ߵ��˶��㼣���˽������գ�ѧϰ��ȷ��Ķ�λ���������˶�·��ѡ���Ż�����ʵ���ҶԹ�˾��Ʒ��ץȡ����װ�����ȹ��ܡ�
2��ʵѵ����
��1����ҵ�����˵Ļ�����ʶ��
��2����ҵ������ʾ�����˶�������
��3����ҵ�����˵ĵ�λʾ�̡�
��4����ҵ�����˻����������á�
��5����ҵ�����˻����˶�ָ��ѧϰ��
��6����ҵ�����˻���ʾ�����ij���༭��
��7����ҵ������IO����Ӧ�á�
��8����ҵ�����˻������߷�����
��9����ҵ���������װ����������ʾ�̡�
��10��ҵ�����˴��������������ʾ�̡�
��Ҫ���ã�
|
��� |
��� |
Ʒ���ͺ� |
���� |
��ע |
|
1 |
��ҵ������ģ�� |
|
1 |
|
|
2 |
ʾ���� |
|
1 |
|




