SB-GA3工业机器人拆装与调试实训台
一、工业机器人拆装与调试实训室方案简介
工业机器人拆装与调试实训平台选用先进的六关节机器人,由机器人本体装调平台与电气维护平台组成。机器人本体装调平台可以拆卸到螺丝级,是学生对工业机器人核心部件和机械结构的认知平台,从内部构成理解工业机器人的运动方式和动力传递。让学生可掌握:机器人本体结构认、谐波减速器安装与维护、常用安装工具使用、机器人基本术语与图形符号、机器人零位调试、机器人精度测试、机器人典型维护操作。
机器人电气维护平台,是把电气柜各大部件拆散安装在网孔架上,清晰体现机器人电气连接原理。让学生可掌握:电气器件认知、电气原理学习、电气故障排除与维护。
装配完成的机器人本体,在电控柜的驱动下,能实际完成应用操作。通过选购模块,可实施机器人基础示教编程(轨迹坐标训练模块)、基础工艺编程(码垛模块)。
平台配套提供三维拆装软件(RobotAC),3D真实重现了机器人本体拆装与电气维护平台功能。RobotAC可完成大部分硬件平台上的实训项目。
本平台适合职业院校、高校的工业自动化类相关专业,《工业机器人安装与调试》、《工业机器人系统维护》等课程的实训教学,也适合工业机器人安装调试技能比赛。

工业机器人拆装与调试实训台效果图
二、技术参数
(1)产品尺寸:
机器人本体装调平台:长1500mm*宽1000mm*高1500mm
电气维护平台:长800mm*宽500mm*高1600mm
(2)工作电源:单相三线制 AC220V±5% 50HZ
(3)安全保护:漏电保护,过流保护,短路保护
(4)额定功率:≤2KW
三、产品特点:
1、工业机器人本体装调
采用工业级机器人,金属刚体,可拆解到螺丝级,可反复拆装练习。
2、电气常见拆装
把工业级的机器人电气柜的大部件拆散安装在网孔架上,清晰体现机器人电气连接原理。
3、机器人故障维护
不仅让学习掌握机器人安装与调试,还提供机器人日常应用的典型维护。
4、三维仿真软件
按真实工业机器人1:1开发的虚拟仿真拆装机器人,方便学生在电脑上反复练习而会损坏硬件。三维仿真软件"学、练、考"对由学生自主学习,并自动考核。
5、丰富教学资源
提供课程标准、项目化的教材、真人操作视频。
四、机器人本体拆装与调试平台主要组成
1、本体拆装台
外形尺寸约为1500×1000×1600mm。工作台板采用工业铝型材拼接搭建,台面上布有T型槽,通过M6快速拆卸的T型螺母和弹簧螺母块安装不同模块。机台上有机器人装调区和基础实训扩展区。机器人装调区上有一个安装平台,该平台可以360°旋转和固定,这样安装人员可以在固定位置对机器人无死角安装。扩展区可以安装基础实训模块、搬运码垛模块等。平台的背板可装夹机器人安装工艺文件。
2、本体散件部件
机器人本体散件都包装好放在对应抽屉里,主要包括钢体、减速机、电机、本线内线、拖地线、线环、各种小配件等。
3、机器人本体
装配完成后,本体如下:

本体参数如下: 本体
|
型号 |
VR6-S1 |
|
|
动作自由度 |
6 |
|
|
最大负载 |
6kg |
|
|
工作范围 |
700mm |
|
|
手腕法兰面 |
800mm |
|
|
最大范围 |
J1 |
±170° |
|
J2 |
-60°~+160° |
|
|
J3 |
-65°~+210° |
|
|
J4 |
±180° |
|
|
J5 |
±135° |
|
|
J6 |
±360° |
|
|
最大运动速度 |
J1 |
444°/s |
|
J2 |
444°/s |
|
|
J3 |
444°/s |
|
|
J4 |
441°/s |
|
|
J5 |
441°/s |
|
|
J6 |
706°/s |
|
|
重复定位精度 |
±0.02mm |
|
|
本体重量 |
<30kg |
|
|
电源电压 |
220V |
|
|
能耗 |
1.0KW |
|
|
安装方式 |
地面安装,支架安装,倒置安装 |
|
|
应用 |
装配、物料搬运等 |
|
|
本体防护等级 |
IP65 |
|
|
电控柜防护等级 |
IP43 |
|
|
用户接线 |
IO接口8芯,气动接线2*Φ4mm |
|
4、拆装工具套件

预置式扭力扳手 内六角扳手
预置式扭力扳手具有预设扭矩数值和声响装置。当紧固件的拧紧扭矩达到预设数值时,能自动发出讯号"卡嗒"(click)的一声,同时伴有明显的手感振动,提示完成工作。解除作用力后,扳手各相关零件能自动复位。精确度符合ISO6789:1992.ASMEB107.14,GGG-W-686.±4%。
5、测量百分表
百分表是利用精密齿条齿轮机构制成的表式通用长度测量工具。通常由测头、量杆、防震弹簧、齿条、齿轮、游丝、圆表盘及指针等组成。把百分表安装在机器人J6法兰上,通过机器人的不同位置的循环运动,可快速的测试机器人重复精度。

6、基础示教编程模块
基础示教编程模块是一个可选配模块。机器人调试完成后,达到出厂精度,可通过示教器的示教与编程,掌握机器人各种坐标,轨迹运动操作。
基础示教编程模块采用银色铝合金材质,包含:TCP标定;直线、圆弧、曲线轨迹训练;坐标系统标定。

7、基础工艺编程模块
人基础示教编程(轨迹坐标训练模块)、基础工艺编程(码垛模块)。
机器人的工艺应用有多种,本模块通过码垛操作,掌握码垛算法的原理,以及通过示教教的调试技巧。
码垛模块采用银色铝合金材质,包含:码垛底板,不同大小的码垛工件。

自动落料机构 码垛平台效果图
五、机器人电控维护平台主要组成
1、网孔架
把工业机器人的电气柜各大部件拆散安装在网孔架上,清晰体现机器人电气连接原理。主要部件有:电源、滤波器、机器人运动控制器、伺服驱动器、示教器、扩展IO。同进时还有一个故障设置模块,通过人机界面操作可以设置典型的故障,并通过人机界面设置解除故障。

2、机器人运动控制器
运动控制器作为机器人的核心部分,是影响机器人性能的关键部分之一。工业机器人控制系统的主要任务是控制机器人在工作空间中的运动位置、姿态和轨迹,操作顺序及动作的时间等。它同时具有编程简单、软件菜单操作、友好的人机交互界面、在线操作提示和使用方便等特点。本运动控制器的特点:
1)采用x86硬件平台,高性能硬件,丰富的外围接口,方便外设扩展;
2)采用实时Linux操作系统。实时性强,软件开发方便;
3)支持EtherCAT协议,作为主站功能,通过网络实现对伺服模块与IO模型管理;
4)模块化软件开发,不同的子任务由不同的功能模块实现 ,以利于修改、添加、配置功能;
5)内置了16输入16输出的IO模块;
6)支持二次开发,方便功能扩展。
机器人运动控制器接口如下:

X10:EtherCAT主站输出,RJ45口
X11:内置IO模型输出,16输入16输出
TP:示教器接口;
X12:系统信号接口
X17:USB扩展口
X16:管理网口,RJ45
X13:RS232接口
X14:RS232接口
X15:RS485接口
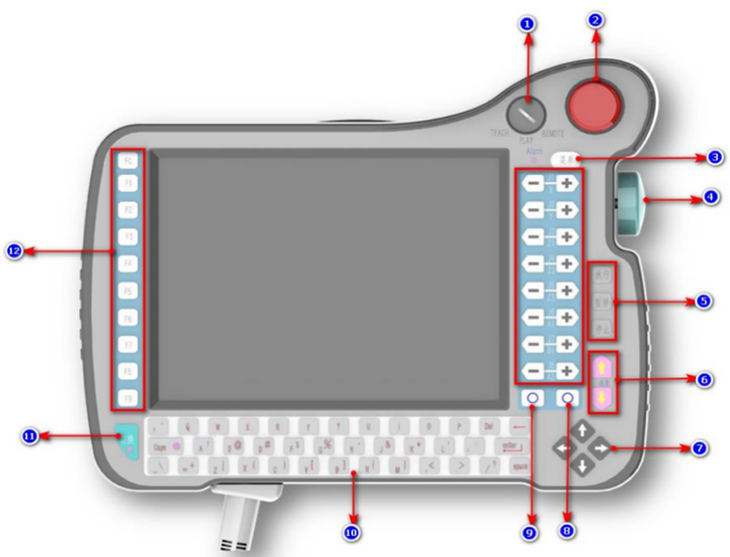
3、机器人示教器
示教器采用8寸触摸屏,显示分辨率1026*768。示教器上有物理键盘,方便快捷编写程序,至少有:26个字母键,通过切换键与数字及特殊符号切换、4个方向键、10个功能健、8组轴操作键,每组至少有+与-键。共不少于76物理按键。示教器接口说明:
|
序号 |
说明 |
|
1 |
模式开关选择,用于手动/自动模式的切换 |
|
2 |
急停按钮,用于危险情况下使用机器人停机,带自锁功能 |
|
3 |
菜单键,显示软件的主菜单 |
|
4 |
滚轮鼠标 |
|
5 |
工艺的执行、暂停、停止键,用于程序运行的状态切换 |
|
6 |
速度设置键,用于设定手动速度倍率的按键 |
|
7 |
方向键,用于编程时光标示的移动 |
|
8 |
回零键,长按将机器人回到零位状态 |
|
9 |
示教运行模式切换 |
|
10 |
键盘 |
|
11 |
键盘切换键,用于字母大小写、数字、特殊字符之间的切换 |
|
12 |
功能键 |
示教器能实时采集机器人关节的各种参数,包括扭矩、速度、位置等,采集时间小于10ms,并能把采集的数据形成曲线查看,包括扭矩曲线、速度曲线、加速度曲线。方便现场性能分析检测。
4、伺服驱动器
机器人伺服系统精确控制电机速度、位置,可以将指令转化为转矩和转速以驱动控制对象。采用高性能RC6伺服驱动器, RC6是一款紧凑型一体化网络伺服驱动器。采用6多轴一体化设计,机身尺寸仅为231mm*316mm*81mm,而单轴额定电流可达5A。RC6采用标准的EtherCAT协议,配置成从站,与运动控制器实时通讯;

5、伺服调试与诊断软件
伺服系统是机器人本体的核心部件,平台提供的伺服调试软件(DriverStarter)运行在上位PC机,通过RS485与伺服驱动器通讯。DriverStarter具有完善的实时监控功能,实时监控系统状态、运动状态、输入输出信号等。信号经分析处理,能实时显示转速、温度和电流等多种波形曲线。并具有故障智能诊断功能,当异常发生时,上位机界面能显示故障位置,以及处理方法。可方便对机器人整机能调试,以及伺服系统的故障诊断与分析。

6、故障设置模块
故障设置模块安装在网孔架上,模块上有HMI。故障设置模拟机器人常见的典型故障,使学员掌握各种故障现象及排查方法。通过HMI设障与排障,自动操作,不用人工插拔线。通过人机界面设置,能设置5种以上典型故障;排障恢复后的电控维护平台,可驱动机器人本体运行
7、本体联调
解除故障后的机器人电控平台可以驱动机器人本体。能在本次采购的虚拟仿真软件里进行离线编程。后置的机器人可下载到机器人机器人控制器运行。控制系统能同时控制硬件实际机器本体与仿真软件的虚拟机器人本体同时运行,包括位置、动作及状态同步。
六、工业机器人拆装与调试仿真软件
RobotAC机器人装调与维护仿真软件,可作为本体拆装实训台的一个辅助功能,更好的让学生熟悉机器人本体和拆装本体。采用实际机器人本体型号为原型,进行高仿真建模,建立完整真实展现机器人场景。同时,拥有高度逼近真实的表面外观和细节感受,创造出身临其境般的实训体验。使用 3D 虚拟引擎技术模拟实际操作环境,支持学生在虚拟场景下进行工业机器人机械认知、原理认知、机械安装与调试、常见故障排查,故障维修等操作。结合实际的设备相辅相成,满足虚实相结合的教学。系统支持多点位配置。安装运行方便,普通配置的 PC 机即可运行本软件。
机器人本体安装,包含了各轴之间安装的次序及简述工艺流程,注意事项,及机械部分的保养。整机安装完成调试,以及调试过程中问题的发现及处理方式。
提供各处机器人零位标定技术,以及机器人整机精度测度,生产性能合格的机器人。

拆装软件部分截图
软件特点:
1、工业机器人装调与维护仿真软件主要是为学习工业机器人本体结构、本体装配、本体维护等三维仿真软件;采用先进的虚拟仿真技术,软件具有虚拟装配车间场景,模拟真实工业机器人的装配环境。
2、采用真实工业机器人3D模型,并按硬件实训台1:1尺寸建模
3、实时交互操作,场景中布置大量机器人知识展板,方便自主学习。
4、具备情景化、游戏化实训设计,每个项目教学设计过程涵盖实训示范、演练、测试模块;
5、本体器件认知模块:介绍每个本体器件的外观,功能,使用注意事项目。
6、电气器件认识模块:介绍每个电气器件的外观,功能,使用注意事项目。
6、本体装配与拆卸模块:具有自动装配与卸载、3D交互方式的手动装配与拆卸、零件与组件的拆卸与装配、装配过程中所需工具的选择以及拆卸全过程的信息记录与提示等功能,具有真实感强、操作简单、便于自学等优点。
7、整机调试模块:本体装配完成后,学习系统上电流程,通过示教器对机器人每个关节调试。以及关节零位调整。
8、机器人维护:对典型电气故障进行维护操作
9、录制功能:在练习操作时,录制模块对实训过程中操作实时录制功能,并可随时对操作记录进行查看;
10、考试模块:机器人拆装考核,并自动评分。
七、教学资源
1、配套实训指导书
配套的工业机器人拆装与调试实训指导书,采用项目化教学。是一本系统讲解了工业机器人结构原理、装配、生产现场安装、调试、故障排查及维护教学一体的实训指导书。本体可以拆装到螺钉级,并提供拆装散件的实物图。并配套全流程的真人视频教程,详细介绍各部分的机械安装、拆解过程,以及注意事项。包含以下实训项目:
项目一:工业机器人基础知识
任务一:工业机器人常用传动机构及工作原理
任务二:工业机器人用减速器
问题与思考一
项目二:工业机器人的组成及安装要求
任务一:工业机器人的主体
任务二:工业机器人控制系统
任务三工业机器人安装要求
问题与思考二
项目三:机器人安装调试常用工具的认知和使用
任务一:工业机器人机械装配常用工具、测量仪器
任务二:工业机器人常用电工工具和电工仪表仪器
问题与思考三
项目四:工业机器人机械本体的拆装与检测
任务一:工业机器人机械部分的拆卸与检测
任务二:工业机器人机械部分的装配与检测
问题与思考四
项目五:工业机器人电气系统的装配与调试
任务一:机器人电气元件介绍及电气安全知识
任务二:工业机器人电气工作原理
任务三:机器人控制柜电气元件安装与接线
任务四:机器人本体电气元件安装与接线
问题与思考五
项目六:工业机器人基本运动任务调试
任务一:工业机器人运动介绍
任务二:工业机器人标定介绍
任务三:工业机器人示教编程介绍
问题与思考六
项目七:工业机器人常见故障分析及精度检测方法
任务一:机器人常见故障及 其解决办法
任务二:机器人重复定位精度检测方法
任务三:机器人绝对精度检测方法
问题与思考七
项目八:工业机器人伺服系统调试
任务一:伺服调试软件操作
任务二:机器人运动伺服性能测量分析
附录1:螺钉拧紧力矩表
附录2:机器人装配作业指导书
2、真人拆装视频
真人工业机器人拆卸与装配视频二维码,详细每个步骤操作及要点讲解。
机器人拆装真人视频
3、机器人三维设计图纸
提供全套的机器人本体设计3D资料,采用STEP格式。学生可以学习机器人本体设计,也可以在原来的3D文件基础上,根据需求进行修改,开发自己的机器人本体结构。并把设计文件加工成实际的机械零件,DIY动手装配自己的机器人本体。
八、系统配置清单
|
序号 |
名称 |
主要内容及规格 |
数量 |
备注 |
|
1 |
本体拆装台机体 |
翻盖型材桌面、配有4个福马轮 |
1套 |
|
|
2 |
工业机器人 |
VR6桌面型6轴6kg机器人 |
1套 |
整机提供 |
|
3 |
工业机器人固定底座 |
可360°旋转并固定 |
1套 |
|
|
4 |
工具箱 |
采用标准工具箱,并配有包装的拆除工具,测试百分表 |
1套 |
|
|
5 |
电控网孔架 |
安装电控器件的网孔支架 |
1套 |
|
|
6 |
机器人电控器件 |
电源、滤波器、机器人运动控制器、伺服驱动器、示教器、扩展IO。 |
1套 |
|
|
7 |
故障设置模块 |
故障设置人机界面,继电器 |
1套 |
|
|
8 |
工控机 |
I5 CPU,4G内存,1G显示存 |
1套 |
扩展选配 |
|
9 |
基础训练模块 |
轨迹编程训练,坐标编程训练 |
1套 |
扩展选配 |
|
10 |
码垛模块 |
300*300mm平台,6工件码垛 |
1套 |
扩展选配 |
|
11 |
机器人工具 |
TCP针对与吸盘符合工具 |
1套 |
扩展选配 |
|
12 |
伺服调试与诊断软件 |
DriverStarter |
1套 |
|
|
13 |
机器人拆装与调试仿真软件 |
RobotAC |
1套 |
|
|
13 |
教学资源 |
1、《工业机器人安装与调试》课程标准 2、《工业机器人安装与调试》教材 3、工业机器人拆装与调试视频; 4、工业机器人solidworks 3D设计图纸; |
1套 |
|





